机器人中的数值优化(一)
文档维护:Arvin
网页部署:Arvin
▶
写在前面:本文内容是作者在深蓝学院机器人中的数值优化学习时的笔记,作者按照自己的理解进行了记录,如果有错误的地方还请执政。如涉侵权,请联系删除。
凸优化基础
最优化问题概括
最优化问题一般可以描述为:
凸集合与凸函数
凸集
对于$\mathbb{R}^{n}$中的两个点$x_{1}\ne x_{2}$,形如$y=\theta x_{1}+(1-\theta) x_{2}$的点形成了过点$x_{1}$和$x_{2}$的直线。当$0\le \theta \le1$,这样的点形成了连接点的$x_{1}$和$x_{2}$的线段。
定义:如果过集合C中任意两点的直线都在C内,则成C为放射集,即
线性方程组$Ax=b$的解集是仿射集。反之,任何仿射集都可以表示成一个线性方程组的解。
定义:如果连接集合C中任意两点的线段都在C内,则称C为凸集,即
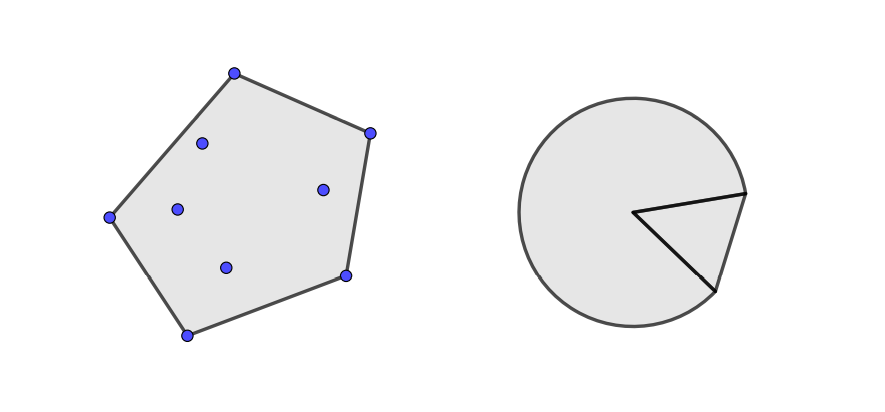
从凸集可以引出凸组合和凸包等概念,形如
的点称为$x_{1},x_{2},…,x_{k}$的凸组合。集合S中点所有可能的凸组合构成的集合称为S的凸包,记作conv S是包含S的最小凸集。如下图所示,左边为离散点集的凸包,右边为扇形的凸包:
若在凸组合的定义中去掉$\theta_{i}\ge 0$的限制,可以得到仿射包的概念。
如下图所示,展示了$ \mathbb{R}^{3}$中圆盘S的仿射包,其为一个平面:
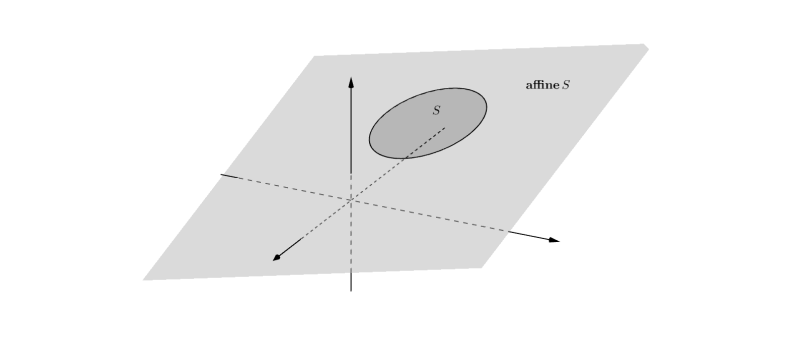
定义:(仿射包)设S为$\mathbb{R}$的子集,称如下集合为S的仿射包:$\left\{x \mid x=\theta_{1} x_{1}+\theta_{2} x_{2}+\cdots+\theta_{k} x_{k}, \quad x_{1}, x_{2}, \cdots, x_{k} \in S, \quad \theta_{1}+\theta_{2}+\cdots+\theta_{k}=1\right\}$,记为affine S。
形如$x=\theta_{1} x_{1}+\theta_{2} x_{2}, \quad \theta_{1}>0, \theta_{2}>0$的点称为点$x_{1},x_{2}$的锥组合,若集合S中任意点的锥组合都在S中,则称S为凸锥,如下图所示:
高阶函数
- 函数(Function):
- 梯度(Gradient):
$Let f(x):Rn→R\mathrm{Let~}f(x):\mathbb{R}^n\to\mathbb{R}$,梯度向量包含所有一阶偏导数:
该矢量指示最陡上升的方向。因此,向量 $-\nabla f(x)$ 表示该点的函数最速下降的方向。
- 海森矩阵(Hessian):
$\mathrm{Let~}f(x):\mathbb{R}^n\to\mathbb{R}$,海森矩阵包含所有二阶偏导数:
但实际上,Hessian 可以是这样的张量: $(f(x):\mathbb{R}^n\to\mathbb{R}^m)$ 只是 3d 张量,每个切片只是对应的 hessian标量函数$\left(H\left(f_{1}(x)\right),H\left(f_{2}(x)\right),\ldots,H\left(f_{m}(x)\right)\right)$。
- 雅可比矩阵(Jacobian):
多维梯度的推广:$f(x):\mathbb{R}^n\to\mathbb{R}^m$
- 泰勒展开:
事实上,我们可以将海森矩阵看作梯度的雅可比。
凸函数
定义:(凸函数)设函数$f$为适当函数,如果dom $f$是凸集,且
对所有$x, y \in \operatorname{dom} f, 0 \leqslant \theta \leqslant 1$,则称$f$为凸函数。
直观地来看,连接凸函数的图像上任意两点的线段都在函数图像上方。
梯度下降法
原理
梯度下降法其原理可用公式进行表示:
这是一个迭代公式:其中$\tau$表示搜索步长,$d$表示搜索方向即负梯度方向。步长的设定通常会采用如下几种方法:
恒定步长(Constant step size):
递减步长(Diminishing step size):
步长的精确搜索(Exact line search):
步长的非精确搜索(Inexact line search):
主要讲述一下步长的精确搜索和不精确搜索。
步长的精确搜索
若我们已经知道了一个下降方向$d_{k}$,就只需要求参数$\alpha$使其满足一维优化问题$\min f\left(x^{k}+\alpha d\right)$的解,令$\phi(\alpha)=f\left(x_{k}+\alpha d_{k}\right)$,则$\phi^{\prime}(\alpha)=\nabla f\left(x_{k}+\alpha d_{k}\right)^{T} d_{k}=0$,求解该线性方程组即可。对于简单的方程,精确搜索是非常快速有效的。但是当目标函数比较复杂或维度比较高时,每次求解步长将会非常耗时。因此我们往往采用非精确搜索的方法。
步长的非精确搜索
步长的非精确搜索一般按照Armijo搜索条件去搜索。Armijo条件(充分减少条件):
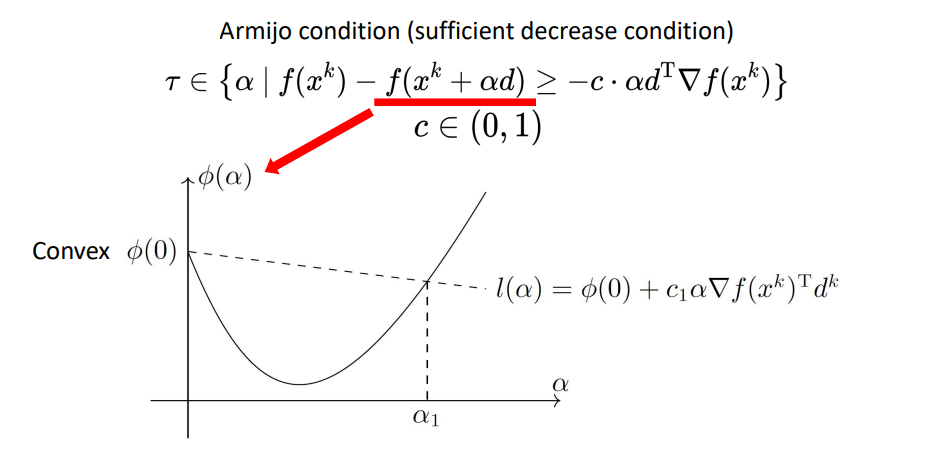
利用步长的非精确搜索方法,其伪代码如下:
- 给定最初点$x^{1}$,给定初始步长$\tau$,设置允许误差$\theta > 0$,迭代次数k=1
- 计算梯度作为搜索方向:$d^{k} = -\nabla f\left(x^{k}\right)$
- 根据Armijo条件更新步长:如果$f\left(x^{k}+\tau d\right)>f\left(x^{k}\right)+c \cdot \tau d^{T} \nabla f\left(x^{k}\right)$,则$\tau \leftarrow \tau / 2$直到满足Armijo条件为止。
- 进行迭代:$x^{k+1}=x^{k}+\tau d$
- 若精度达到误差要求迭代结束,否则转到步骤2
修正阻尼牛顿法
通过二阶泰勒展开:
最小化二次近似:
规定:
牛顿步长:
其伪代码如下:
initialization $x\gets\boldsymbol{x}_0\in\mathbb{R}^n$
while $|\nabla f(\boldsymbol{x})|>\delta$ do
$\boldsymbol{d}\gets-\boldsymbol{M}^{-1}\nabla f(\boldsymbol{x})$
$t\gets$ backtracking line search
$x\gets x+td$
end while
return
作业
要求
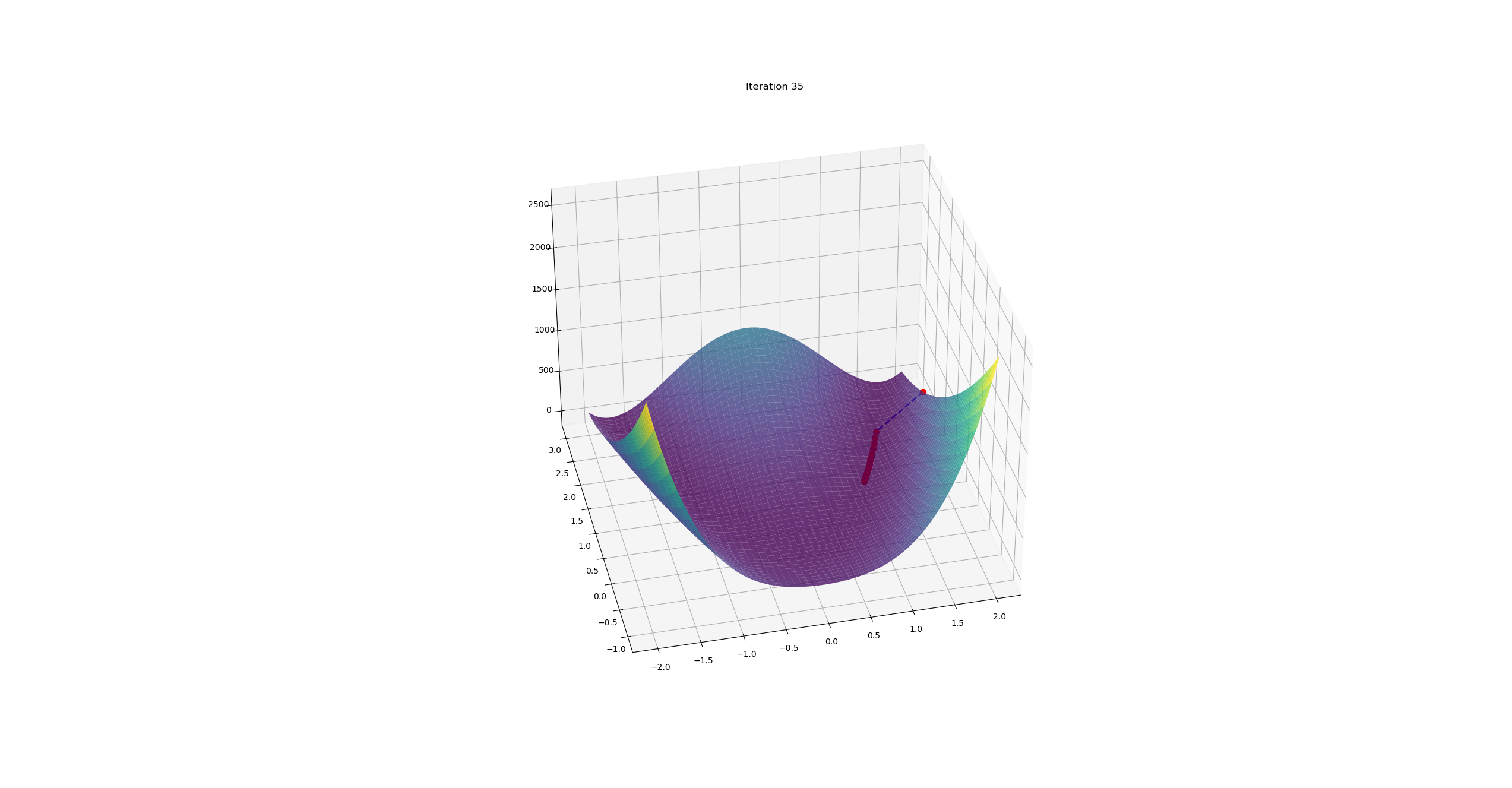
使用 Armijo condition 实现线搜索最陡梯度下降。
目标函数为Rosebrock函数:
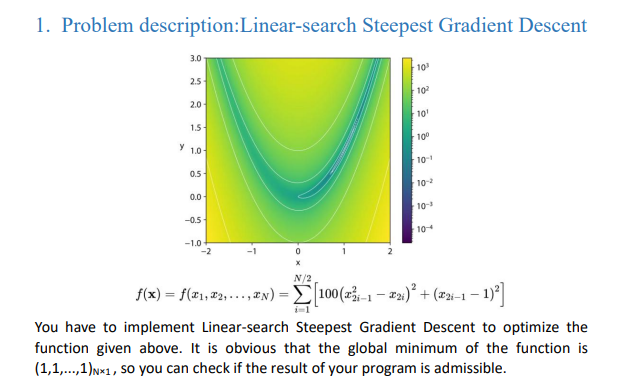
结果
具体代码见:https://github.com/arvinzyj/Optimization-in-Robotic/tree/main/chapter01
2维
- 首先设置维度和初始点:2, [2, 2]
- 然后运行
1 | python demo01.py |
- 输出结果
最后结果:
迭代次数:33997
位置:[1.00111873349992 1.00224319227457]
2n维
- 首先设置维度和初始点:4, [2, 2, 2, 2]
- 然后运行
1 | python demo01.py |
- 输出结果
最后结果:
迭代次数:35737
位置:[1.00079076283692 1.00158531378990 1.00079076283692 1.00158531378990]